")
目次
はじめに
前回の記事では、複雑な形状の分布を持つデータを
分析し、確率分布にモデル化する方法と、そのための
Juliaサンプルコードについて紹介しました。
ここまでは主に1次元のデータを扱ってきましたが、
実際はロボットの姿勢である]といったように、
多次元のデータを扱う事も多々あります。
今回の記事では、2次元のガウス分布に従うデータを例に、
多次元データの処理方法と、Juliaサンプルコードについて
紹介します。
GitHubリポジトリ
本記事で紹介するコードは全てこちらのGitHubリポジトリで
公開しています。
github.com
サンプルデータの2次元ガウス分布
今回はサンプルデータとして、下記ディレクトリにある
データを取り上げます。
data/sensor_data_700.txt
これは、距離700[mm]先にある壁をLiDARと光センサで
観測したときのセンサ値です。このデータから特定の
条件を満たすデータを抽出して、2次元のヒストグラム
に可視化するのを次のコードで行います。
src/prob_stats/multi_dim_gauss_dist/marginal_kde/marginal_kde_700.jl
module MarginalKde700 using DataFrames, CSV, StatsPlots pyplot() function main(is_test=false) # input data_path = joinpath(split(@__FILE__, "src")[1], "data/sensor_data_700.txt") df_org = CSV.read(data_path, DataFrame, header=["date", "time", "ir", "lidar"], delim=' ') # extract between 12 and 16 o'clock df_ext = df_org[(df_org.time.>=120000).&(df_org.time.<160000),:] # plot marginal kde marginalkde(df_ext.ir, df_ext.lidar, c=:ice, xlabel="ir", ylabel="liDAR") if is_test == false save_path = joinpath(split(@__FILE__, "src")[1], "src/prob_stats/multi_dim_gauss_dist/marginal_kde/marginal_kde_700.png") savefig(save_path) end end end
このコードでは、13行目で12時から16時のデータを抽出し、
そのうちのLiDARと光センサのセンサ値をカーネル密度推定で
確率密度関数を推定し、ガウス分布に当てはめることを
やっています。
カーネル密度推定についてはこちらの記事を参照ください。
ja.wikipedia.org
そしてコードを実行すると、次のグラフが作成されます。

このヒストグラムは、両センサ値を変数としたときの
同時確率分布と解釈できます。
確率密度関数と共分散行列
今回のような多次元のガウス分布の確率密度関数は、
一般に次のように表されます。

式中のは平均値、
は共分散行列で、次のような
行列です。
,
は
と
の分散、
は共分散です。
また、共分散行列の逆行列をとすると、

となり、精度行列あるいは情報行列と呼ばれています。
共分散行列の計算
先程2次元のヒストグラムで可視化したデータの
共分散行列を計算してみましょう。次のコードを
実行することで、サンプルデータにおけるLiDARと
光センサのセンサ値の平均と分散、共分散を求める
ことができます。
src/prob_stats/multi_dim_gauss_dist/covariance/calc_covariance.jl
module CalcCovariance using DataFrames, CSV, Statistics function main() # input data_path = joinpath(split(@__FILE__, "src")[1], "data/sensor_data_700.txt") df_org = CSV.read(data_path, DataFrame, header=["date", "time", "ir", "lidar"], delim=' ') # extract between 12 and 16 o'clock df_ext = df_org[(df_org.time.>=120000).&(df_org.time.<160000),:] # calculate println("Variance of ir: $(var(df_ext.ir))") println("Variance of lidar: $(var(df_ext.lidar))") diff_ir = df_ext.ir .- mean(df_ext.ir) diff_lidar = df_ext.lidar .- mean(df_ext.lidar) println("Mean of ir: $(mean(df_ext.ir))") println("Mean of lidar: $(mean(df_ext.lidar))") a = diff_ir .* diff_lidar println("Covariance: $(sum(a)/size(df_ext)[1])") end end
15~16行目でそれぞれのデータの分散、
21~22行目でそれぞれの平均、そして
24~25行目で共分散を計算しており、
次のような結果となります。
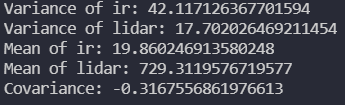
以上より、次のような平均値と共分散行列が
得られました。

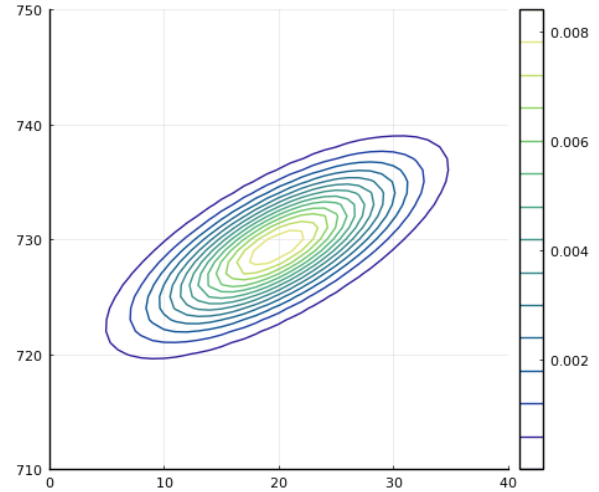
これらを使い、最後に次のコードで
ガウス分布を描画してみます。
src/prob_stats/multi_dim_gauss_dist/contour_pdf/contour_pdf.jl
module ContourPdf using DataFrames, CSV, Statistics, LinearAlgebra using Base.Iterators, Plots pyplot() function pdf(x, mu, cov_mat) # determinant det_mat = det(cov_mat) diff_x = x - mu return exp(-((diff_x'/cov_mat)*diff_x)/2)/(2*pi*sqrt(det_mat)) end function main(is_test=false) # input data_path = joinpath(split(@__FILE__, "src")[1], "data/sensor_data_700.txt") df_org = CSV.read(data_path, DataFrame, header=["date", "time", "ir", "lidar"], delim=' ') # extract between 12 and 16 o'clock df_ext = df_org[(df_org.time.>=120000).&(df_org.time.<160000),:] # variance var_ir = var(df_ext.ir) var_lidar = var(df_ext.lidar) #covariance diff_ir = df_ext.ir .- mean(df_ext.ir) diff_lidar = df_ext.lidar .- mean(df_ext.lidar) a = diff_ir .* diff_lidar covar = cov(df_ext.ir, df_ext.lidar, corrected=false) # covariance matrix cov_mat = [var_ir covar; covar var_lidar] # mean(mu) mu = [mean(df_ext.ir); mean(df_ext.lidar)] # plot contour vx = 0:40 vy = 710:750 z = [pdf([x; y], mu, cov_mat) for x in vx, y in vy] contour(z', label="contour", c=:haline, xlabel="x", ylabel="y", aspect_ratio=:equal) if is_test == false save_path = joinpath(split(@__FILE__, "src")[1], "src/prob_stats/multi_dim_gauss_dist/contour_pdf/contour_pdf.png") savefig(save_path) end end end
まず、6~12行目で確率密度関数を定義しておきます。
データから求めた平均値と共分散行列、変数の各値を
入力として、確率密度を計算します。
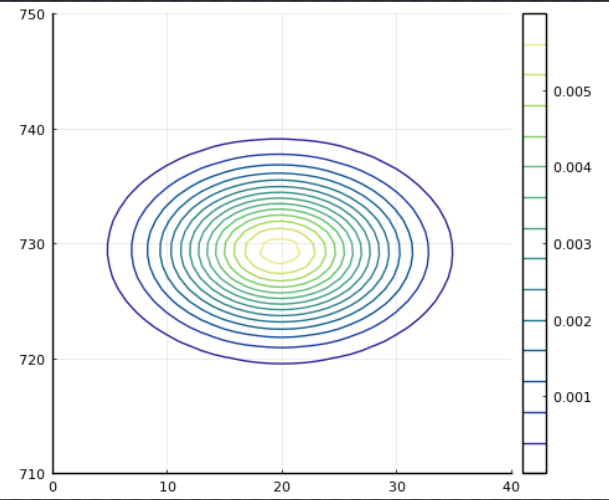
そして、40~45行目で各X-Y座標における確率密度を
計算し、それを高さ情報とした等高線グラフを描画
します。
先に求めた平均値を中心に左右対称に広がり、
同じく先に示した2次元ヒストグラムとほぼ
同じ形状になっていることが分かります。
共分散とは?
今回のような2次元データの場合、共分散は次の
式で求められます。
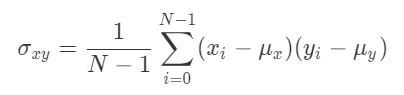
これを見ると、求められる値は平均値に対して
,
がともに大きいか小さいと正になり、
そうでなければ負となることが分かります。
先程のガウス分布の等高線を描画するコードで、
共分散行列を計算する部分を次のように変更
してみましょう。
# covariance matrix cov_mat = [var_ir covar; covar var_lidar] cov_mat[1, 2] += 20 cov_mat[2, 1] += 20
これにより、元々の共分散は負の値でしたが、
20が足されたことで正の値になり、ガウス分布の
等高線は次のように変わります。
このグラフから、一方のデータの値が大きくなる
あるいは小さくなると、もう一方も同様に変化する
という頻度が相対的に高いということが分かり、
共分散の値を見ることでも、なんとなくその傾向を
把握することができます。
誤差楕円
今度は、下記のコードにより形状が異なる三つの
ガウス分布を描画してみます。
src/prob_stats/multi_dim_gauss_dist/multiple_gauss_dist.jl
module MultiGaussDist using Plots, Base.Iterators, LinearAlgebra pyplot() function pdf(x, mu, cov_mat) # determinant det_mat = det(cov_mat) diff_x = x - mu return exp(-((diff_x'/cov_mat)*diff_x)/2)/(2*pi*sqrt(det_mat)) end function main(is_test=false) # x-y grid vx = 0:200 vy = 0:100 # mu, covariance matrix # contour a mu_a = [50; 50] cov_a = [50 0; 0 100] # contour b mu_b = [100; 50] cov_b = [125 0; 0 25] # contour c mu_c = [150; 50] cov_c = [100 -25*sqrt(3); -25*sqrt(3) 50] # probability density # contour a z_a = [pdf([x; y], mu_a, cov_a) for x in vx, y in vy] # contour b z_b = [pdf([x; y], mu_b, cov_b) for x in vx, y in vy] # contour c z_c = [pdf([x; y], mu_c, cov_c) for x in vx, y in vy] # plot contours contour(vx, vy, z_a', c=:haline, aspect_ratio=:equal) contour!(vx, vy, z_b', c=:haline, aspect_ratio=:equal) contour!(vx, vy, z_c', c=:haline, aspect_ratio=:equal) if is_test == false save_path = joinpath(split(@__FILE__, "src")[1], "src/prob_stats/multi_dim_gauss_dist/multiple_gauss_dist/multiple_gauss_dist.png") savefig(save_path) end end end
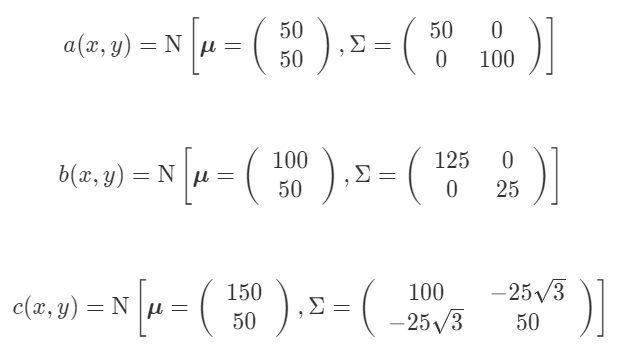
18~27行目で定義しているように、ここでは
下記三種類の平均値と共分散行列を持つ
ガウス分布としています。
そして先に紹介したコードを実行すると、
a, b, cそれぞれのガウス分布が左から順番に
並んだこちらのような図が描画されます。
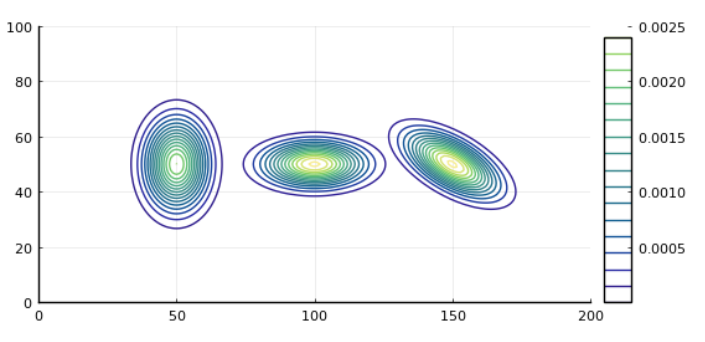
それぞれに対応した平均値と共分散行列を
見てみると、分散,
の大きさが
それぞれの軸方向の分布の広がりを決め、
共分散が0でない正か負の値になると、
分布が傾きを持つ(回転する)ことが分かります。
またこのとき、分布は楕円形となります。
ここで、cの分布の共分散行列の固有値と
固有ベクトルを計算し、分布の傾きを調べてみます。
固有値/固有ベクトルと楕円形の関係は、こちらの記事を
参照ください。
次のコードを実行すると、cの分布の固有値/固有ベクトルを
計算し、分布の楕円の長軸方向と短軸方向のベクトルを一緒に
描画してくれます。
src/prob_stats/multi_dim_gauss_dist/eigen/calc_plot_eigen.jl
module CalcPlotEigen using Plots, Base.Iterators, LinearAlgebra pyplot() function pdf(x, mu, cov_mat) # determinant det_mat = det(cov_mat) diff_x = x - mu return exp(-((diff_x'/cov_mat)*diff_x)/2)/(2*pi*sqrt(det_mat)) end function main(is_test=false) # x-y grid vx = 0:200 vy = 0:100 # mu, covariance matrix mu = [150; 50] cov = [100 -25*sqrt(3); -25*sqrt(3) 50] # calculate eigen values/vectors eig_vals, eig_vecs = eigen(cov) println("Eigen Values: $(eig_vals)") println("Eigen Vectors: $(eig_vecs)") println("Eigen Vector1: $(eig_vecs[:, 1])") println("Eigen Vector2: $(eig_vecs[:, 2])") # long or short if eig_vals[1] > eig_vals[2] long_val = eig_vals[1] long_vec = eig_vecs[:, 1] short_val = eig_vals[2] short_vec = eig_vecs[:, 2] else long_val = eig_vals[2] long_vec = eig_vecs[:, 2] short_val = eig_vals[1] short_vec = eig_vecs[:, 1] end println("Long Value: $(long_val)") println("Long Vector: $(long_vec)") println("Short Value: $(short_val)") println("Short Vector: $(short_vec)") # plot z = [pdf([x; y], mu, cov) for x in vx, y in vy] contour(vx, vy, z', c=:haline, aspect_ratio=:equal) long = 2 * sqrt(long_val) * long_vec short = 2 * sqrt(short_val) * short_vec quiver!([mu[1]], [mu[2]], quiver=([long[1]], [long[2]]), c=:red, aspect_ratio=:equal) quiver!([mu[1]], [mu[2]], quiver=([short[1]], [short[2]]), c=:blue, aspect_ratio=:equal) if is_test == false save_path = joinpath(split(@__FILE__, "src")[1], "src/prob_stats/multi_dim_gauss_dist/eigen/contour_eigen.png") savefig(save_path) end end end
23行目で固有値/固有ベクトルが計算されますが、
長軸方向と短軸方向のどちらかに対応した2つの
値とベクトルが得られます。そのため、30~40行目で
どちらが長軸か短軸かを判定する必要があります。
そして、計算結果はこちらのようになります。
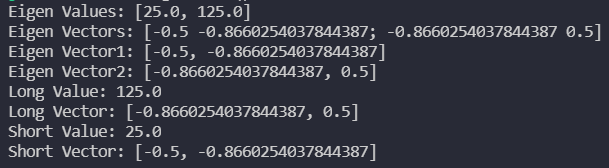
長軸方向の固有値が, 短軸方向の固有値が
とすると、
、そしてそれぞれに対応する固有ベクトルは

となります。
このとき、元の共分散行列と固有値/固有ベクトルの間には
という関係が成り立ちます。
は対角線上の要素以外がゼロの対角行列、
は固有ベクトルを2つ並べた2×2の行列
となります。
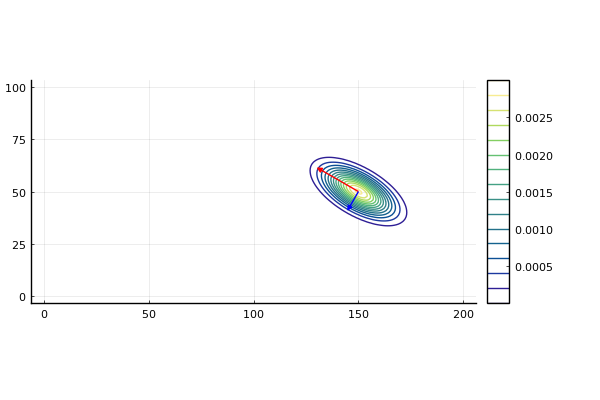
最後にこれらの計算結果を使って、コードの49~50行目で
長軸方向と短軸方向を向き、それぞれの長さの比に比例した
ベクトルを求めて、51~54行目で
ガウス分布に重ねて次のように描画します。
まとめ
今回の記事では、多次元のデータからそれぞれの
平均値と共分散行列を求め、それを使ってガウス分布
に当てはめる方法を紹介しました。
また、ガウス分布の広がりや傾きは、元の共分散
行列の要素によって決まること、その形状は楕円体の
ようになることも示しました。
自律移動のアルゴリズム、特に自己位置推定や
オブジェクトトラッキングなどでは、カルマンフィルタの
ように推定結果の分布を誤差の共分散を利用して
楕円状のガウス分布で近似するといった手法が
よく用いられるので非常に重要です。
今後はこういった具体的なアルゴリズムを紹介
していきます。