")
目次
はじめに
アメリカで自動運転車の開発を進めてる
企業の一つであるWaymoのエンジニアリング
ディレクタ、Sacha ArnoudさんがMITにて
講義を行ったときの動画をYouTubeで見ました。
www.youtube.com
勉強になることがいろいろ聴けたので、そのメモを
今回の記事としてまとめておこうと思います。
Waymoについて
Waymoについてはこちらを参照下さい。
waymo.com
講義メモ
メイントピック
- WaymoとGoogleによる自動運転の一般的な背景
- 道路環境認識のための機械学習と深層学習の歴史的な用途
- 自動運転に用いられる深層学習の技術概要
- 機械学習に強く依存した産業製品の開発に繋がるもの
アメリカにおける衝突事故のデータ
- 42%がヒューマンエラー
- 40歳以上のアメリカ人の内300万人が盲目あるいは視覚障害者
- 人間一人当たり、年間で42時間を道路交通で浪費している
アリゾナ州での自動運転試験
- 搭乗者は後部座席に座り、どこに向かうかボタンでリクエスト
- その後、自動運転車は自動で目的地に向かい走り出す
- 周辺環境の画像から、道路標識や信号などを抽出して判別
- 道の名前や番号、店の看板や広告なども判別できる
- 夜間の走行でも、信号や他車のライトの点灯を認識可能
- 自転車や歩行者の動きをリアルタイムでトラッキング可能
自動運転車の開発に必要な要素
- 地図構築、位置計測、知覚、環境予測
- 行動予測、動作計画、センサデータ処理
- 車とのインターフェース、シミュレーション
センシングシステム構成
- 車両前方左右にはレーダとレーザ、後方左右にはレーダ
- 屋根の上には全方位監視可能なカメラ、レーダ、レーザ
- これらが知覚の役割を果たし、周辺環境を表現する
Point Cloudのクラスタリングと行動予測
- レーザのPoint Cloudをクラスタリング
- 自転車、歩行者、他車両などに分類する
- 前方車両のドアの開閉を認識できる
- 車両から人が降りて来るかもしれないと予測
- それを自転車は避けて進むかもしれないと予測
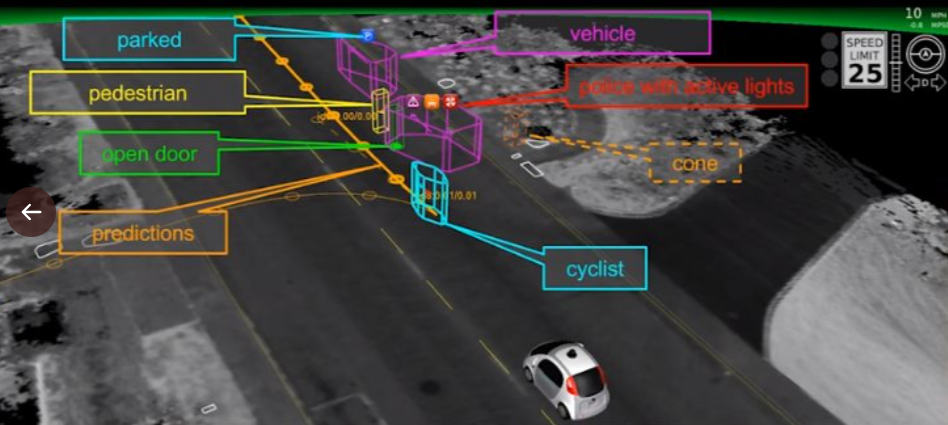
誤認識問題
- 窓ガラスなどへの反射
- 自分の隣を走る車の窓に移った別の車
2台の車がそこに走っていると誤認識する

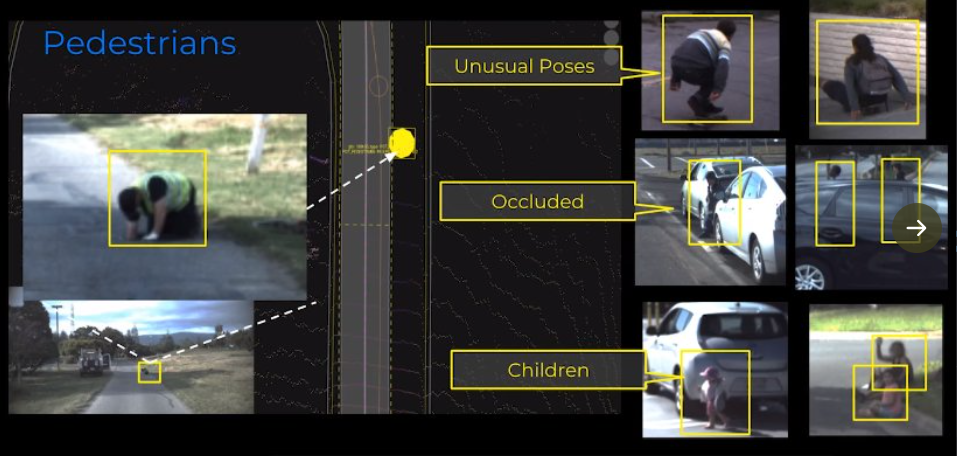
歩行者は様々な姿勢になり、遮蔽されたりする
- 検出して行動を予測することはとても難しい
- 人やマネキンがトラックの荷台に乗って移動するパターン
- それを人だと判断するようなことがあってはいけない
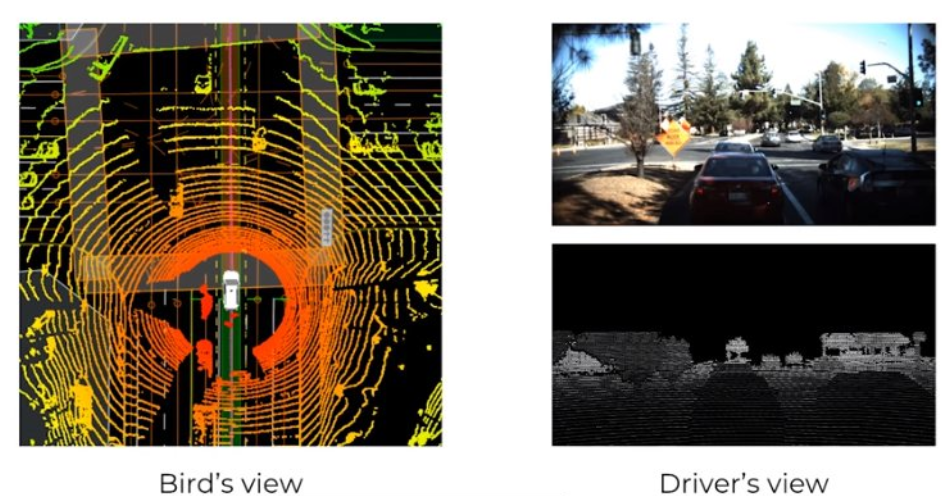
カメラとレーザのセンサフュージョン
- レーザの点群データを2次元平面に投影する
ドライバー視点で取得した画像と組み合わせる
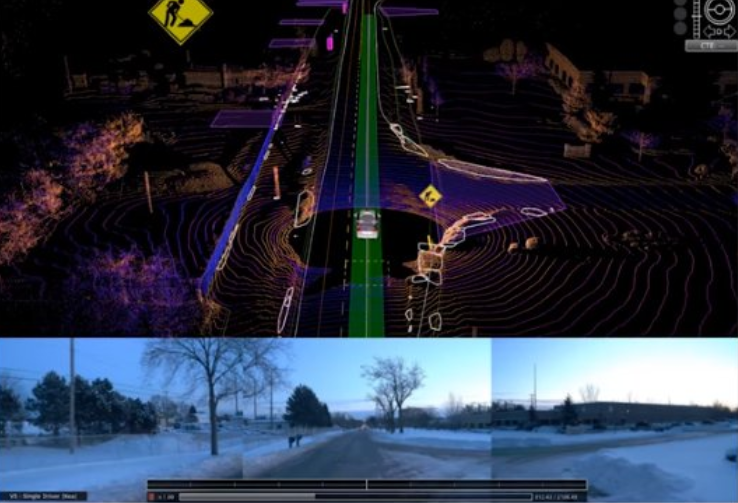
雪のように事前に形状情報を定義できない物体を認識したい
- Smaller Convolutional Networks
- 画像に映る物体を画素単位で分割してクラスタリングする
Semantic Segmentation
時系列の連続データを用いたベクトル表現
RNN(Recurrent Neural Network)との組み合わせ
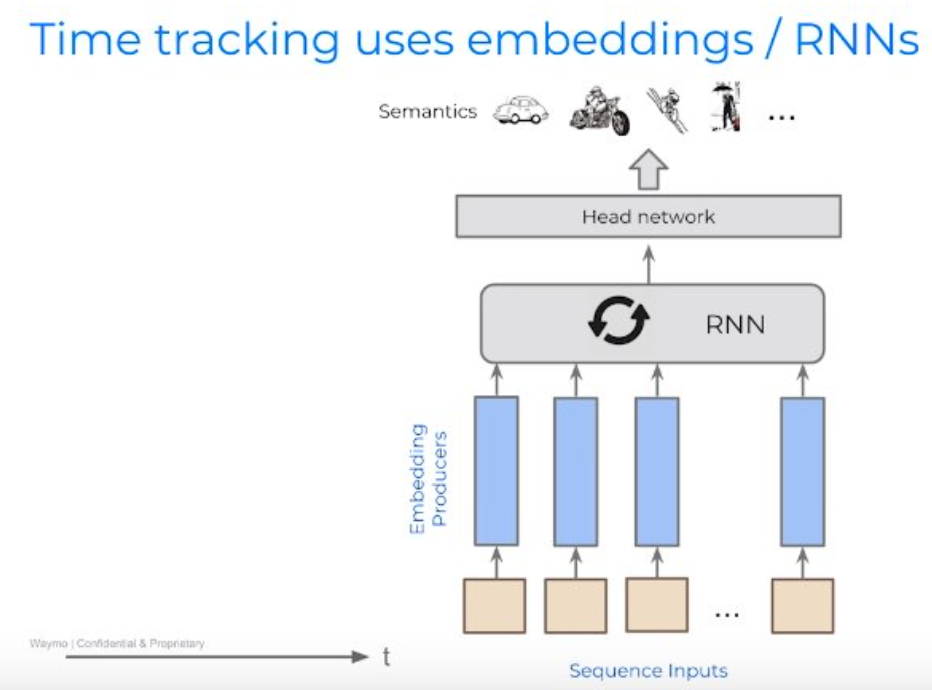
www.procrasist.com走路脇のコーンの検出
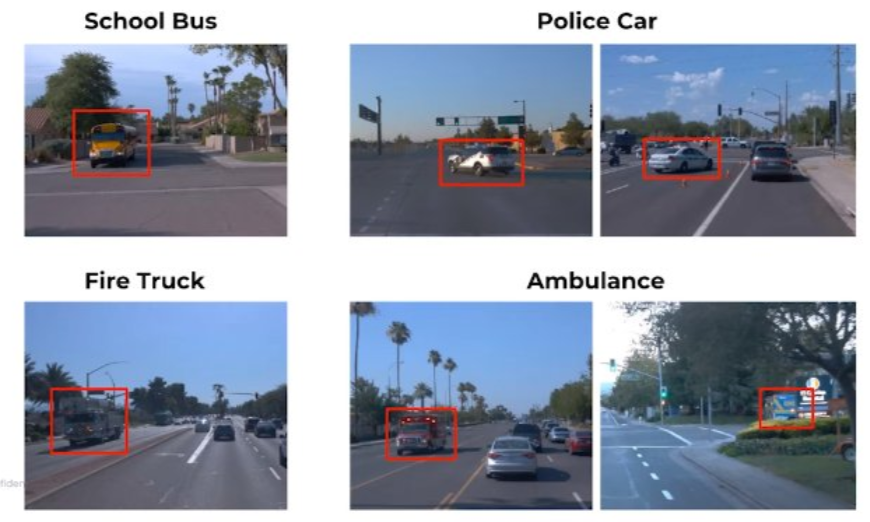
- 通学バス、パトカー、消防車、救急車の分類
- オブジェクトのベクトル表現をディープネットで学習
- GoogleのDNPが開発したwork to Veck
センサの観測範囲内に対象の情報がある場合に有効
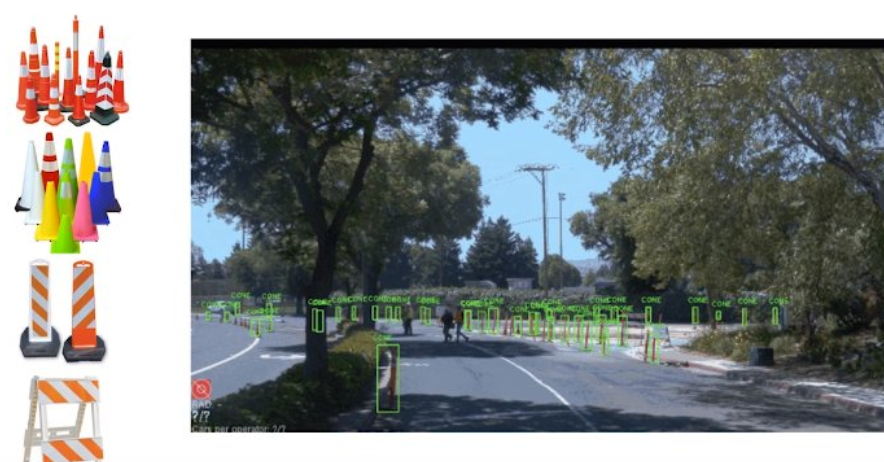
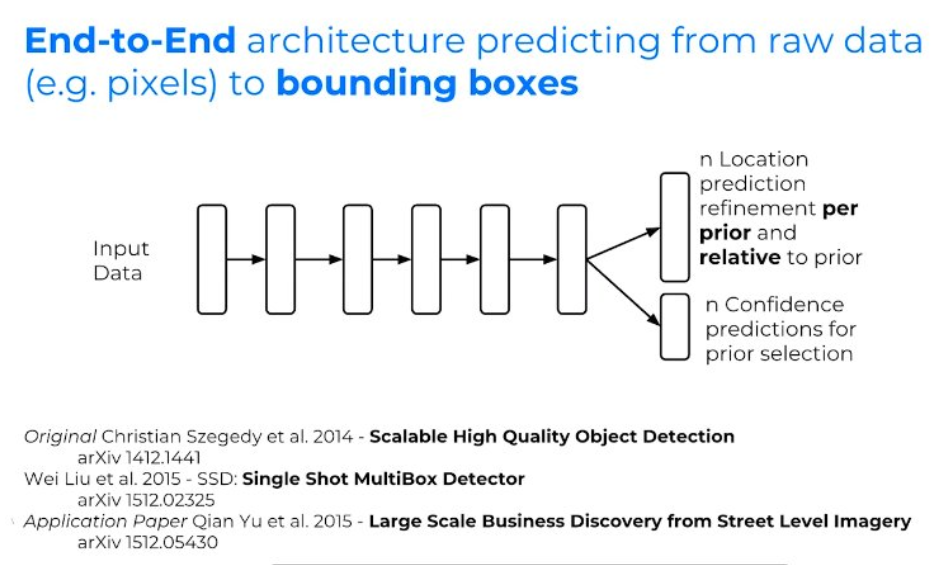
2次元に投影したレーザの点群から形状予測
- それを囲うバウンディングボックスを生成
システムの検証
- 以下の3つを軸にしたシステム検証
Real World Driving, Simulation, Structured Testing

機械学習システムのロバスト性の実機検証

車の進路に別の車を割り込ませての急停車
なかなかリスクの高い試験方法

進路妨害かつ反対車線にも車がいるシチュエーション
- 対向車がいるので車線変更はしない
- 前方の障害物が無くなるのを待つ

今後の課題
- 雪道などでの自動運転
- より複雑な環境の認識や分類


まとめ
機械学習、深層学習をどう活かしているのかが
中心でしたが、後半のシミュレーション環境に
について詳しく聞いてみたかったですね。
実機試験の内容は結構リスキーな印象だけど、
事前のシミュレーションをしっかりやってる
から、そういったリスキーな試験にも臨める
んだろうなと思いました。