
背景
- Baiduの自動運転プラットフォームOSSであるApolloにコントリビュートしたい
- 自動運転車を持っていないので、シミュレーションでApolloを動かす仕組みが必要
- Apolloとの連携をサポートするOSSであるLGSVL Simulatorを使うことにした
自動運転シミュレータに求められる4つの機能
- 実環境を忠実に再現できる機能
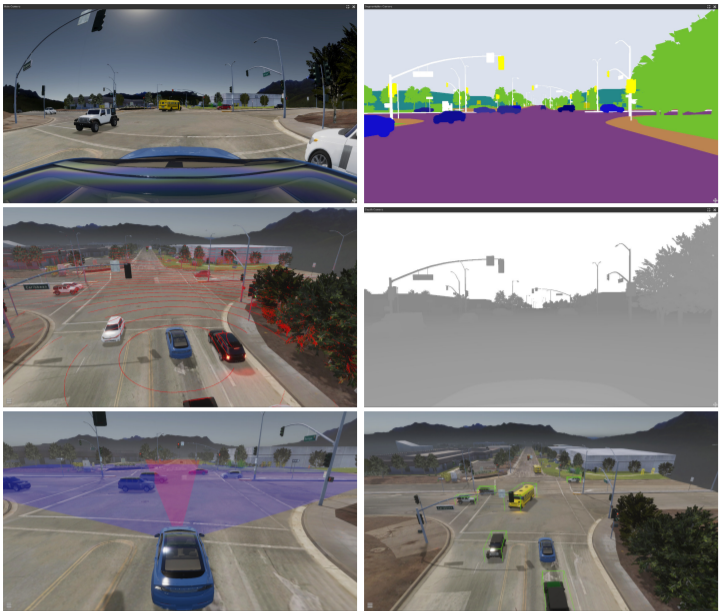
- センサデータを再現できる機能
- 様々な環境や状況を再現できる機能
- インストールや自動運転プラットフォームとの連携が容易であること
LGSVL Simulatorとは
- LGエレクトロニクス社のR&Dセンタで開発された自動運転用シミュレータ
- 車線や信号機などの位置指定や注釈付与といった地図作成支援機能に強み
- Pythonベースの各種APIが充実
- Autoware(上), Apollo(下), ROSとの連携をサポート
- 対応OS: Windows/Linux
- 言語: Python
- ゲームエンジン: Unity
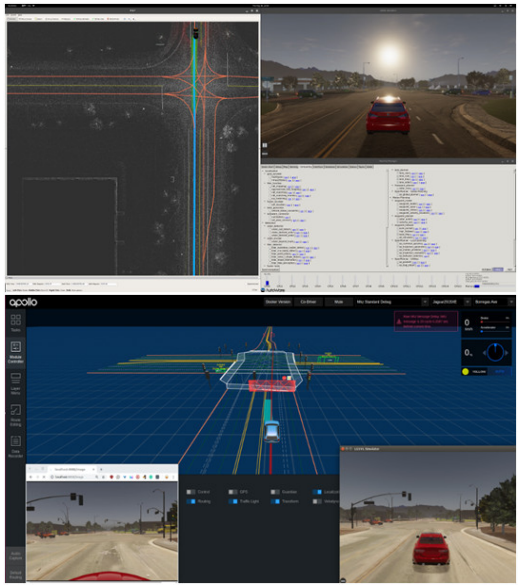
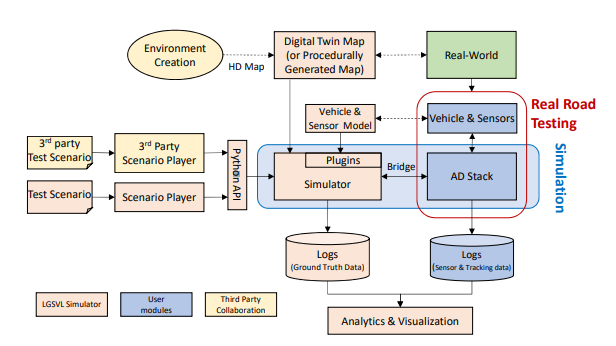
ワークフロー
アーキテクチャ
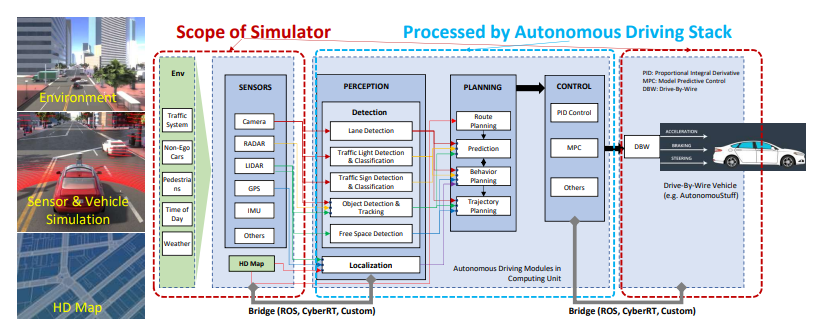
シミュレーション可能なセンサの種類
- カメラ
- RADAR
- LiDAR
- GNSS
- IMU
- JSONファイルでパラメータ設定
公式サイト
GitHubリポジトリ
YouTube
3種類のプロダクト
Simulation platform
- 自動運転車やロボットをモジュール単位でテストできるシミュレータ機能
- コアのシミュレーションエンジンはオープンソースであり無料で使える
- 様々なプラグインで機能を拡張できる
- 有料のPremium版だと更に多くの機能が使え、商用利用も可能になる
Cloud simulation
- クラウドを利用した更に大規模なシミュレーションが可能
- 複数パターンの同時シミュレーション
- プライベートクラウドへデプロイ可能
- CI/CD
- 環境のチーム内シェア
- Premium版でのみ使える
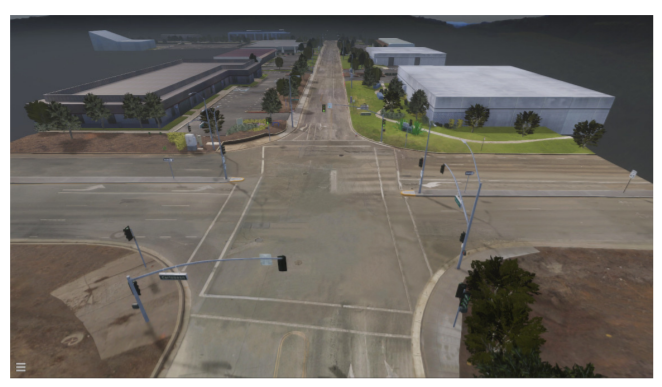
Digital Twin generation
- 実環境を高精度にシミュレータ上で再現する機能
- 事前に画像やPoint Cloudのデータを記録し三次元復元
- 機械学習のトレーニングデータ生成に活用可能
3種類のユースケース
Automotive
- 未来のモビリティサービスの開発のために世界中で活用
- 配達ロボット、ロボタクシー、ライドシェアリング
- フリート管理、モビリティサービスオペレーション
- インフラ計画
Robotics
- 屋内外、マルチモーダルなロボットの開発に活用
- オンサイトデプロイメント、複数ロボットの協調動作
Academia
- 機械学習トレーニング、研究用人口データの生成
- 自動運転のための全モジュールと統合の研究に活用